The laboratory's activities are related to the virtual development and experimental testing of control logics to manage both the navigation and manoeuvring parts of systems autonomously.
The first step in which the logics were studied and developed was virtual, i.e., using propulsion and manoeuvre simulators that were highly customised to the use case. To be able to do this first, it is essential to develop mathematical models that faithfully represent the ship's dynamic behaviour. The next step is the development of algorithms for autonomous navigation and performance evaluation. Using a virtual environment has multiple advantages, such as being able to test the new algorithms countless times very quickly and varying operational scenarios without any associated risk. A further advantage, and the third development phase, is rapid prototyping for immediate implementation of these algorithms in real hardware. The last phase is experimentation, i.e., the developed logics are tested in an indoor and outdoor environment, and the results are analysed and post-processed.
By way of a non-exhaustive list, the main algorithms that an autonomous ship must be equipped with and that the research group studies and develops are as follows:
- Dynamic position positioning, i.e., make the ship able to maintain its position by autonomously actuating propellers and rudders to compensate for environmental disturbances acting on the hull;
- Obstacle detection and avoidance, the autonomous vessel must ensure its own safety and that of other vessels at sea.
- Maintaining a set course, this course can be entered either by an operator on board or can be generated autonomously by the control system itself
- Reaching and pursuing a given target without human intervention.
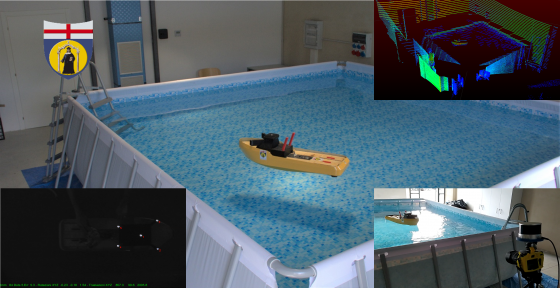
The COMPASS laboratory boasts a small fleet of model scale vessels, specifically approximately 1 metre long, self-propelled and equipped with a variety of sensors, namely:
- 1 tug with 2 azimuth thrusters and a bow thruster (Collaboration with TU-DELFT);
- 2 catamarans equipped with two pump jets for each hull (Collaboration with CNR-INM).
For the indoor tests, the laboratory is equipped with a video-tracking system capable of providing the position and speed of the models in six degrees of freedom, emulating the behaviour of GPS that cannot be used in an indoor environment.
For outdoor testing, all models are equipped with a GPS and inertial platform, which is useful for determining the accelerations along the models' main axes of inertia.
The sensors currently used to carry out the tests are:
- Ultrasonic sensors that use an ultrasonic pulse to measure the distance to a possible obstacle at a short distance (within 4 m);
- LiDAR, which uses laser beams to identify, map and extract quantitative information about the surrounding environment, with an accurate range up to 80 m.
- Thermal imaging camera, an instrument capable of obtaining thermographic images based on the detected radiation of objects;
- Inertial platform, navigation device that provides information on position, speed and acceleration without the need for external references;
- Remote control station, a portable console equipped with all the levers, drives, controls and buttons needed to remotely pilot the models. The control station is also equipped with a touch screen.
- Current sensors to measure propulsion energy consumption.

Laboratory- Responsible: Prof. Michele Martelli