L’attività del laboratorio nello sviluppo virtuale e nel testing sperimentale delle logiche di controllo per poter gestire sia la parte di navigazione che la conduzione degli impianti in modalità autonoma.
Il primo passo con cui le logiche sono state studiate e sviluppate è stato quello virtuale, ovvero utilizzando simulatori di propulsione e manovra altamente customizzati sul caso d’uso. Per potere fare ciò prima è indispensabile sviluppare i modelli matematico che rappresentino fedelmente il comportamento dinamico della nave. Il passo successivo è rappresentato dallo sviluppo di algoritmi per la navigazione autonoma e la valutazione delle performance. L’utilizzo di un ambiente virtuale ha molteplici vantaggi come quello di poter testare i nuovi algoritmi innumerevoli volte, in tempi molto rapidi, variando gli scenari operativi senza nessun rischio associato. Un ulteriore vantaggio, e terza fase dello sviluppo, è la prototipizzazione rapida per un’immediata implementazione di questi algoritmi in hardware reale. L’ultima fase è quella di sperimentazione, ovvero, vengono testate, in ambiente indoor e outdoor, le logiche sviluppate e viene fatta un’attività di analisi e post-processing dei risultati ottenuti.
A titolo non esaustivo, i algoritmi principali di cui una nave autonoma deve essere dotata e che il gruppo di ricerca studia e sviluppa sono i seguenti:
- Posizionamento dinamico della posizione, ovvero, rendere abile la nave di mantenere la posizione attuando autonomamente eliche e timoni per compensare i disturbi ambientali agenti sullo scafo;
- Rilevazione ed evitamento di ostacoli, la nave autonoma deve garantire la propria incolumità e quella delle altre imbarcazioni presenti in mare.
- Mantenimento di una rotta prefissata, questa rotta può essere inserita sia da un operatore a bordo oppure può essere generata autonomamente dal sistema di controllo stesso
- Raggiungimento e inseguimento di un determinato bersaglio senza l’intervento umano.
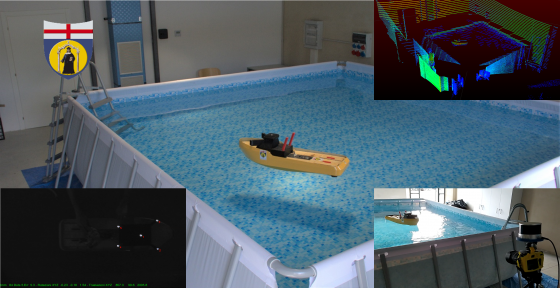
Il laboratorio COMPASS vanta di una piccola flotta di navi in scala modello, nello specifico di circa 1 metro di lunghezza, autopropulse ed equipaggiate di una serie di sensori di varia natura, in particolare:
- 1 modello di rimorchiatore con 2 propulsori azimutali e un’elica di manovra a prora (Collaborazione con TU-DELFT);
- 2 catamarani equipaggiati con due pump jet per ogni scafo (Collaborazione con CNR-INM).
Per le prove indoor il laboratorio è dotato di un sistema di video-tracciamento capace di fornire la posizione e la velocità dei modelli in sei gradi di libertà, al fine di emulare il comportamento del GPS non utilizzabile in un ambiente al chiuso.
Per le prove in esterna tutti i modelli sono forniti di GPS e piattaforma inerziale, utile a conoscere le accelerazioni lungo gli assi principali di inerzia dei modelli.
I sensori attualmente utilizzati per effettuare le prove sono:
- Sensori ultrasonici che sfruttano un impulso ultrasonico per la misurazione della distanza di un eventuale ostacolo a breve distanza (entro i 4 m);
- LiDAR che sfrutta raggi laser per identificare, mappare e estrarre informazioni quantitative circa l’ambiente circostante, con un range accurato fino agli 80 m.
- Termocamera, strumento capace di ottenere immagini termografiche sulla base delle radiazioni rilevate degli oggetti;
- Piattaforma inerziale, dispositivo di navigazione che fornisce informazioni su posizione, velocità e accelerazione senza la necessità di riferimenti esterni;
- Stazioni di controllo remoto, consolle portatile dotata di tutte le leve, azionamenti, comandi e pulsanti necessari per pilotare a distanza i modelli. La stazione di controllo è dotata anche di uno schermo touch screen.
- Sensori di corrente per misurare il consumo energetico della propulsione.

Responsabile Laboratorio Prof. Michele Martelli